# Multi-parametric OLS
The multiprarmetric linear regression is a training procedure based on a linear model. The model makes a prediction by simply computing a weighted sum of the input features, plus a constant term called the bias term (also called the intercept term):
$$ \hat{y}=\theta_0 + \theta_1 x_1 + \theta_2 x_2 + \cdots + \theta_n x_n$$
This new model includes $\theta_n$ unknown parameter. Thus, the model can be writen more easy by using vector notation form for $m$ instances.
Therefore, the model will become in matrix form $Y=X\times\theta$:
$$
\begin{bmatrix}
\hat{y}^0 \\
\hat{y}^1\\
\hat{y}^2\\
\vdots \\
\hat{y}^m
\end{bmatrix}
=
\begin{bmatrix}
1 & x_1^0 & x_2^0 & \cdots & x_n^0\\
1 & x_1^1 & x_2^1 & \cdots & x_n^1\\
1 & x_1^2 & x_2^2 & \cdots & x_n^2\\
\vdots & \vdots & \vdots &\cdots& \vdots\\
1 & x_0^m & x_1^m & \cdots &x_n^m
\end{bmatrix}
\begin{bmatrix}
\theta_0 \\
\theta_1 \\
\theta_2 \\
\vdots \\
\theta_n
\end{bmatrix}
$$
Resulting:
$$\hat{y}= h_\theta(x) = x \theta $$
Now that we have our model, how do we train it?
Please, consider that training the model means adjusting the parameters to reduce the error or minimizing the cost function.
The most common performance measure of a regression model is the Mean Square Error (MSE). Therefore, to train a Linear Regression model, you need to find the value of $\theta$ that minimizes the MSE:
$$J = MSE(X,h_\theta) = \frac{1}{m} \sum_{i=1}^{m} \left(\hat{y}^{(i)}-y^{(i)} \right)^2$$
$$J = MSE(X,h_\theta) = \frac{1}{m} \sum_{i=1}^{m} \left( x^{(i)}\theta-y^{(i)} \right)^2$$
$$J = MSE(X,h_\theta) = \frac{1}{m} \left( x\theta-y \right)^T \left( x\theta-y \right)$$
# The normal equation
To find the value of $\theta$ that minimizes the cost function, there is a closed-form solution that gives the result directly.
This is called the Normal Equation; and can be find it by derivating the MSE equation as a function of $\theta$ and making it equals to zero:
$$\hat{\theta} = (X^T X)^{-1} X^{T} y $$
```python
import pandas as pd
df = pd.read_csv('dataset1.csv')
x1 = df['X1']
df
```
|
X1 |
X2 |
y |
| 0 |
3.745401 |
0.314292 |
9.247570 |
| 1 |
9.507143 |
6.364104 |
16.257728 |
| 2 |
7.319939 |
3.143560 |
16.258844 |
| 3 |
5.986585 |
5.085707 |
6.359638 |
| 4 |
1.560186 |
9.075665 |
-9.739221 |
| ... |
... |
... |
... |
| 95 |
4.937956 |
3.492096 |
6.523018 |
| 96 |
5.227328 |
7.259557 |
28.761328 |
| 97 |
4.275410 |
8.971103 |
-4.306011 |
| 98 |
0.254191 |
8.870864 |
-19.500923 |
| 99 |
1.078914 |
7.798755 |
-10.525044 |
100 rows × 3 columns
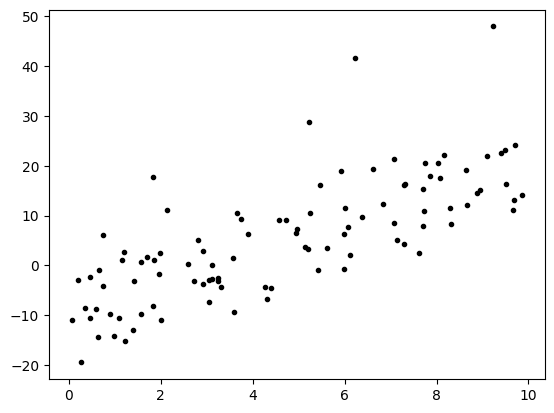
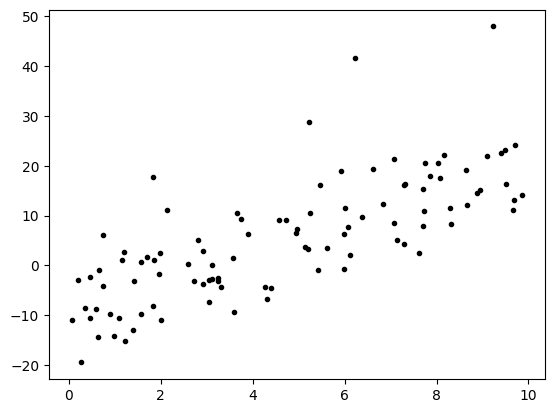
```python
import matplotlib.pyplot as plt
x1 = df['X1']
x2 = df['X2']
y = df['y']
plt.plot(x1,y, '.k')
plt.show()
```
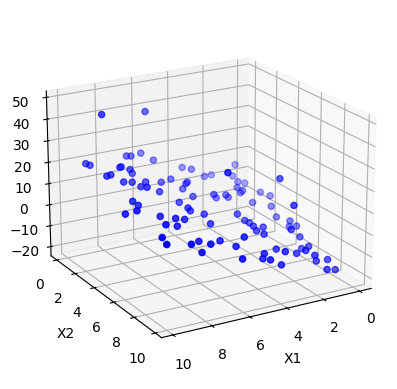
```python
# Create figure and 3D axis
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# Scatter plot
ax.scatter(x1, x2, y, c='blue', marker='o')
ax.view_init(elev=20, azim=60) # adjust camera
# Axis labels
ax.set_xlabel("X1")
ax.set_ylabel("X2")
ax.set_zlabel("Y")
plt.show()
```
# The normal equation
```python
import numpy as np
from numpy.linalg import inv
x0 = np.ones(len(x1))
X = np.c_[x0,x1,x2]
thetaH = np.dot(inv(X.T@X), X.T@y)
thetaH
```
array([ 0.85319677, 2.98010241, -1.871685 ])
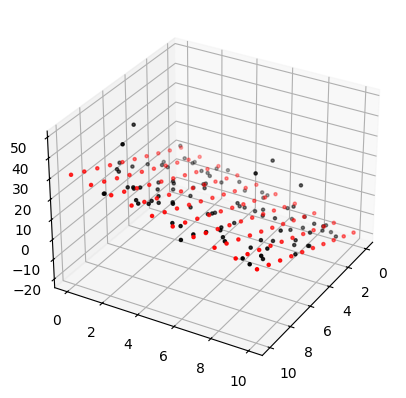
```python
x1New = np.linspace(0,10,10)
x2New= np.linspace(0,10,10)
x1NewG, x2NewG = np.meshgrid(x1New, x2New)
yModel = thetaH[0]+thetaH[1]*x1NewG+thetaH[2]*x2NewG
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(x1NewG, x2NewG, yModel, c='red', marker='.')
ax.scatter(x1, x2, y, c='black', marker='.')
ax.view_init(elev=30, azim=30) # adjust camera
plt.show()
```
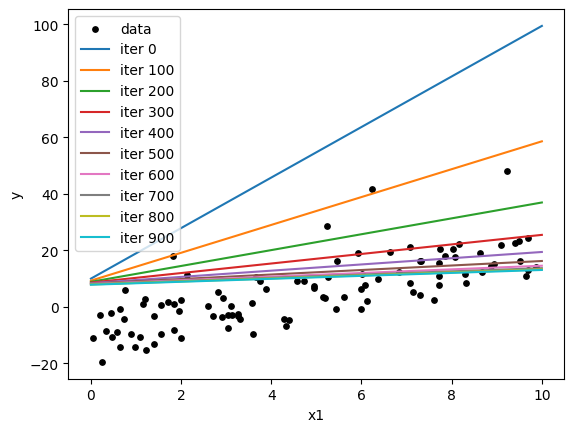
# Batch Gradient Descent
$$\theta_{new} = \theta_{old}-\eta \nabla_\theta$$
$$\nabla_\theta = \frac{2}{m}X^T(X\theta-y)$$
```python
plt.plot(x1,y, '.k', label="data")
plt.show()
```
```python
#bgd:
X = np.c_[np.ones_like(x1), x1]
y = np.array(y, ndmin=2).reshape(-1,1)
np.random.seed(67)
n = 1000
m = len(y)
eta = 0.0001
thetaH = np.array([[10],[9]])
thetaH
```
array([[10],
[ 9]])
```python
thetaH = np.array([[10],[9]])
x1New = np.linspace(0,10,2)
plt.scatter(x1, y, color="k", s=15, label="data")
#yModel = thetaH[0]+thetaH[1]*x1New
#plt.plot(x1New, yModel, '-g', label="zero")
for iter in range(n):
nabla = 2/m * X.T@(X@thetaH-y)
thetaH = thetaH-eta*nabla
if iter % 100 == 0:
yModel = thetaH[0]+thetaH[1]*x1New
plt.plot(x1New,yModel, label=f"iter {iter}")
print("-=-=-=-=-=-=")
print(thetaH)
print("Final values:")
print(thetaH)
plt.xlabel("x1")
plt.ylabel("y")
plt.legend()
plt.show()
```
-=-=-=-=-=-=
[[9.99064619]
[8.94558151]]
-=-=-=-=-=-=
[[9.2750177 ]
[4.93169627]]
-=-=-=-=-=-=
[[8.85060396]
[2.80897556]]
-=-=-=-=-=-=
[[8.58094375]
[1.68958788]]
-=-=-=-=-=-=
[[8.39363522]
[1.10248799]]
-=-=-=-=-=-=
[[8.25026369]
[0.79775963]]
-=-=-=-=-=-=
[[8.13044659]
[0.64280814]]
-=-=-=-=-=-=
[[8.02336849]
[0.56728464]]
-=-=-=-=-=-=
[[7.92328982]
[0.53386527]]
-=-=-=-=-=-=
[[7.82716409]
[0.52274774]]
Final values:
[[7.73430322]
[0.52338189]]
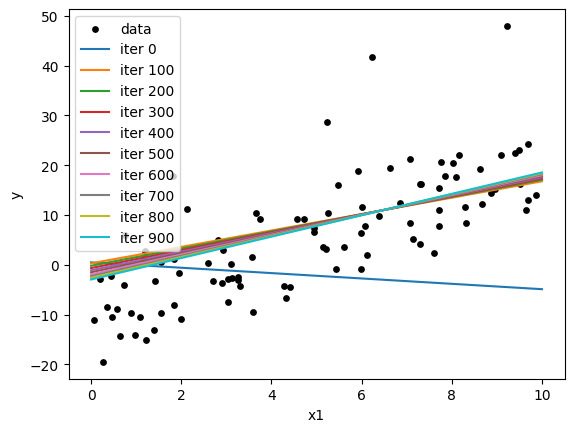
# History
```python
np.random.seed(12)
thetaH = np.random.randn(2,1)
print("Initial values")
print(thetaH)
thetas = np.zeros((n,2))
J_hist = np.zeros((n,1))
thetas[0] = thetaH.ravel()
x1New = np.linspace(0,10,2)
plt.scatter(x1, y, color="k", s=15, label="data")
for iter in range(n):
nabla = 2/m * X.T@(X@thetaH-y)
thetaH = thetaH-eta*nabla
thetas[iter] = thetaH.ravel()
J = (1/m*(X@thetaH - y).T@(X@thetaH - y))
# print("J init")
# print(J)
J_hist[iter] = J
if iter % 100 == 0:
yModel = thetaH[0]+thetaH[1]*x1New
plt.plot(x1New,yModel, label=f"iter {iter}")
# print("-=-=-=-=-=-=")
# print(thetaH)
print("Final values:")
print(thetaH)
plt.xlabel("x1")
plt.ylabel("y")
plt.legend()
plt.show()
```
Initial values
[[ 0.47298583]
[-0.68142588]]
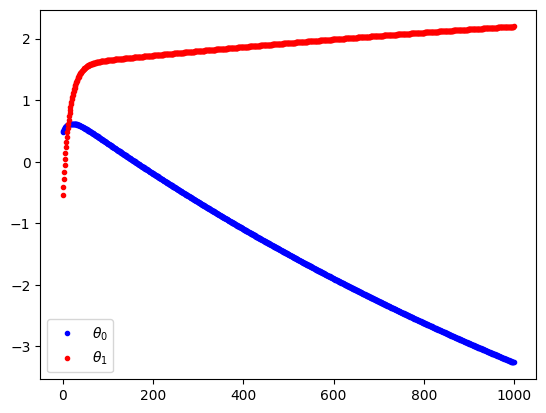
Final values:
[[-3.25986811]
[ 2.19754312]]
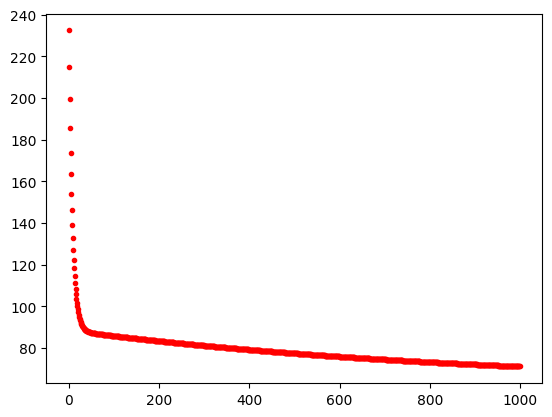
```python
plt.plot(J_hist,'.r')
plt.show
```
```python
plt.plot(thetas[:,0], '.b', label=r"$\theta_0$")
plt.plot(thetas[:,1], '.r', label=r"$\theta_1$")
plt.legend()
plt.show()
```
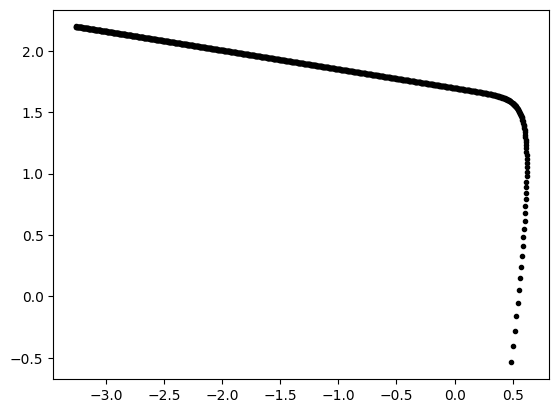
```python
plt.plot(thetas[:,0], thetas[:,1], '.k')
plt.show()
```
```python
J_hist.shape
```
(1000, 1)
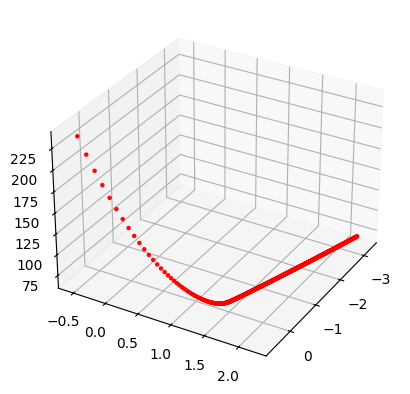
```python
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(thetas[:,0], thetas[:,1], J_hist[:,0], c='red', marker='.')
ax.view_init(elev=30, azim=30) # adjust camera
plt.show()
```